说说图像的仿射变换
仿射变换(Affine Transformation)是图像处理中很常见的操作,它在数学上可以表述为乘以一个矩阵 (线性变换) 接着再加上一个向量 (平移)。
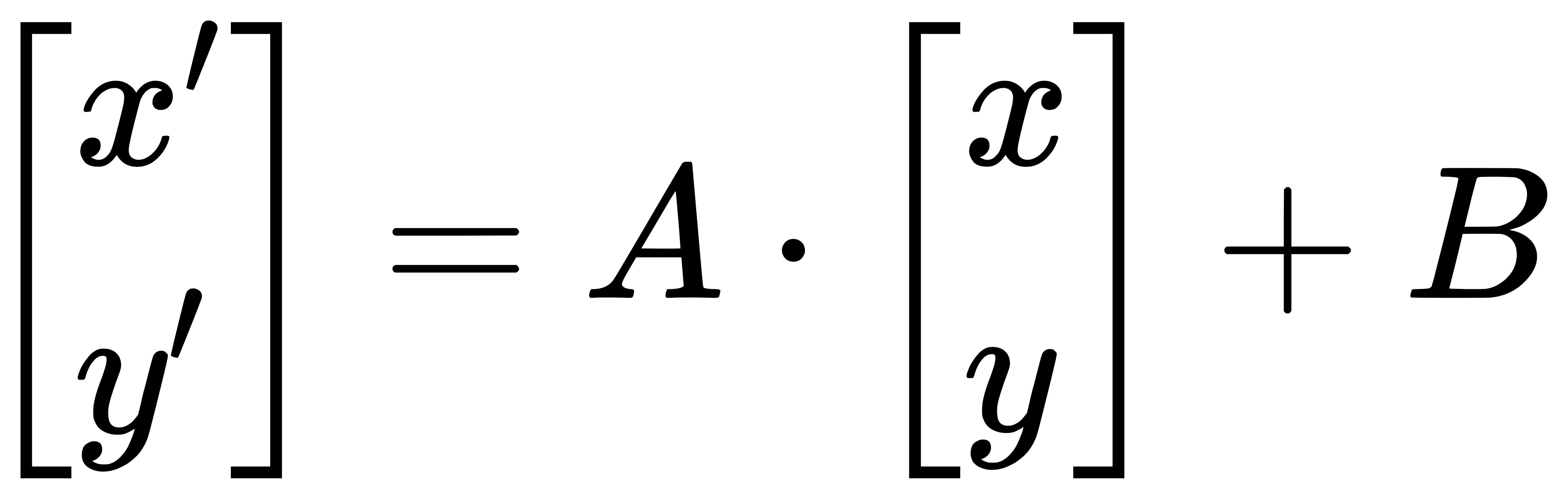
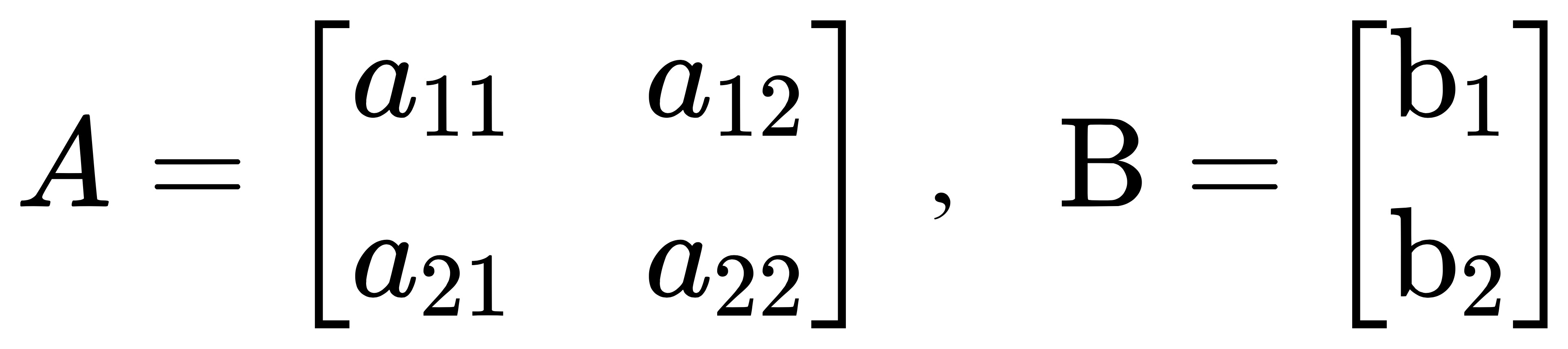
其中:
1. 更紧凑的表示
在学术上,更习惯用一个 2x3 的 M 矩阵来表示这层关系,因此得到:
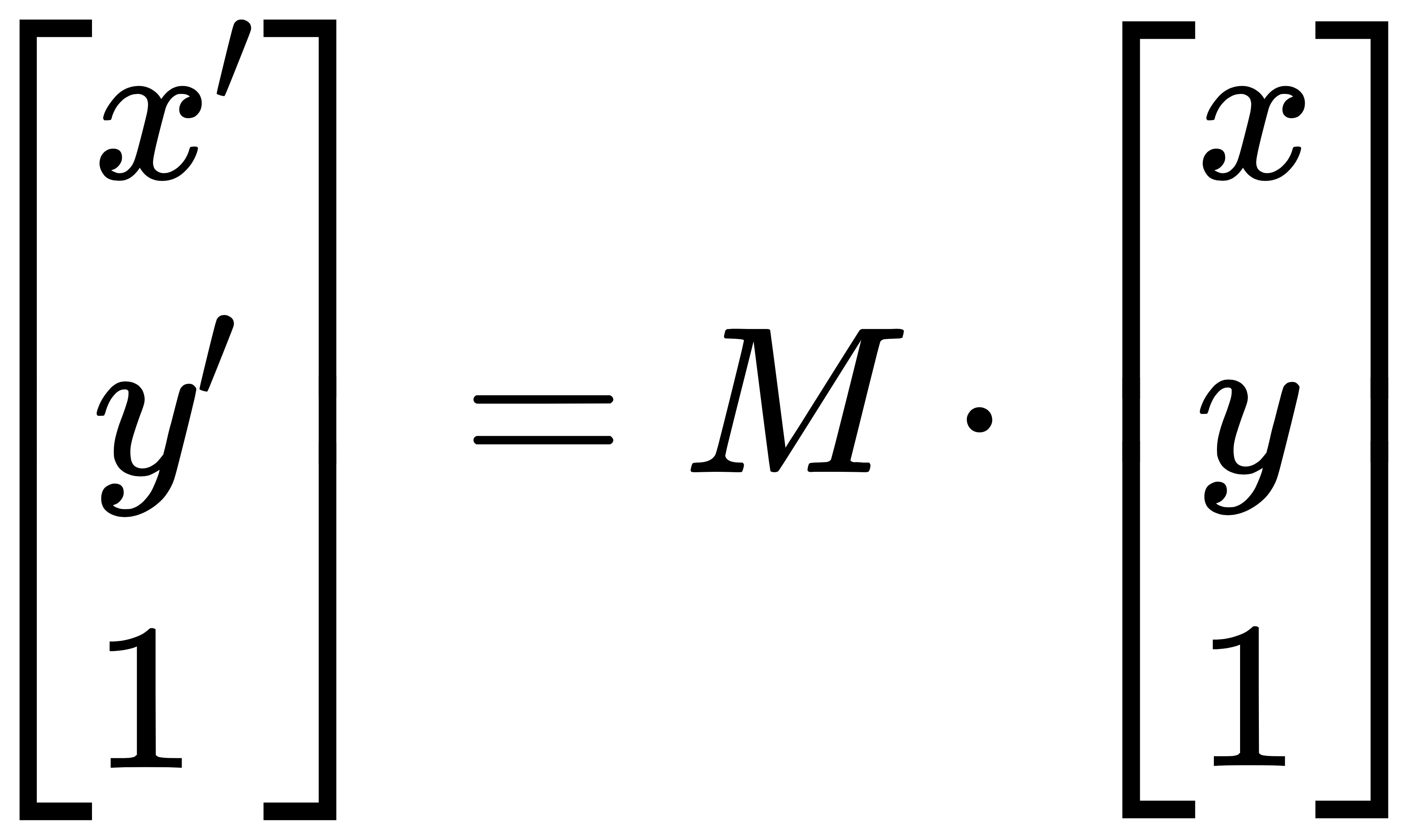
其中:

2. 如何求 M ?
如果用线性方程表示它们之间的转换关系,便得到:
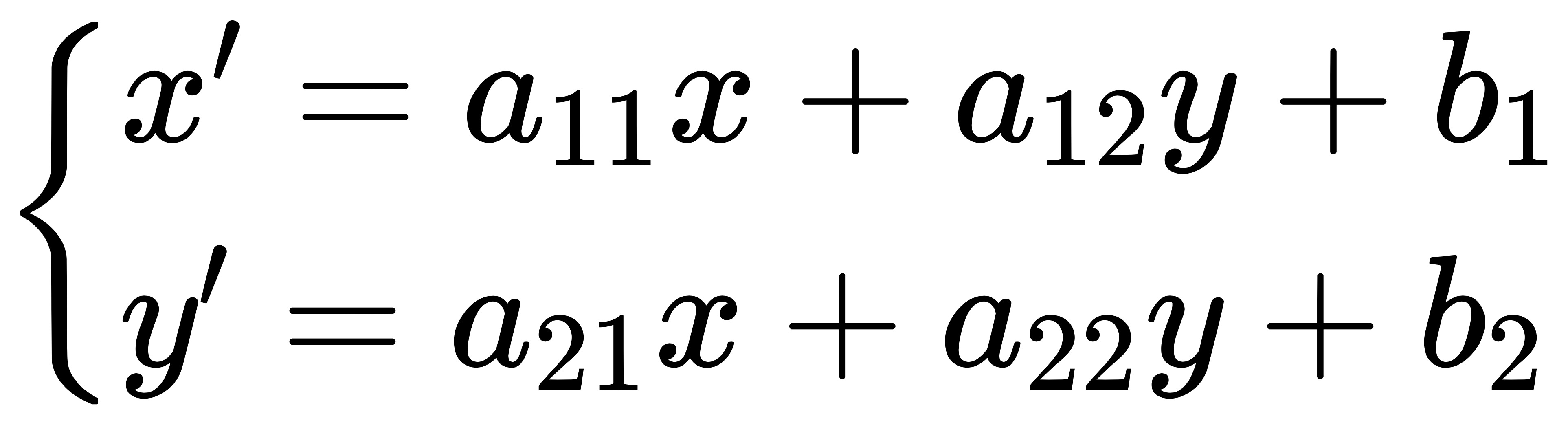
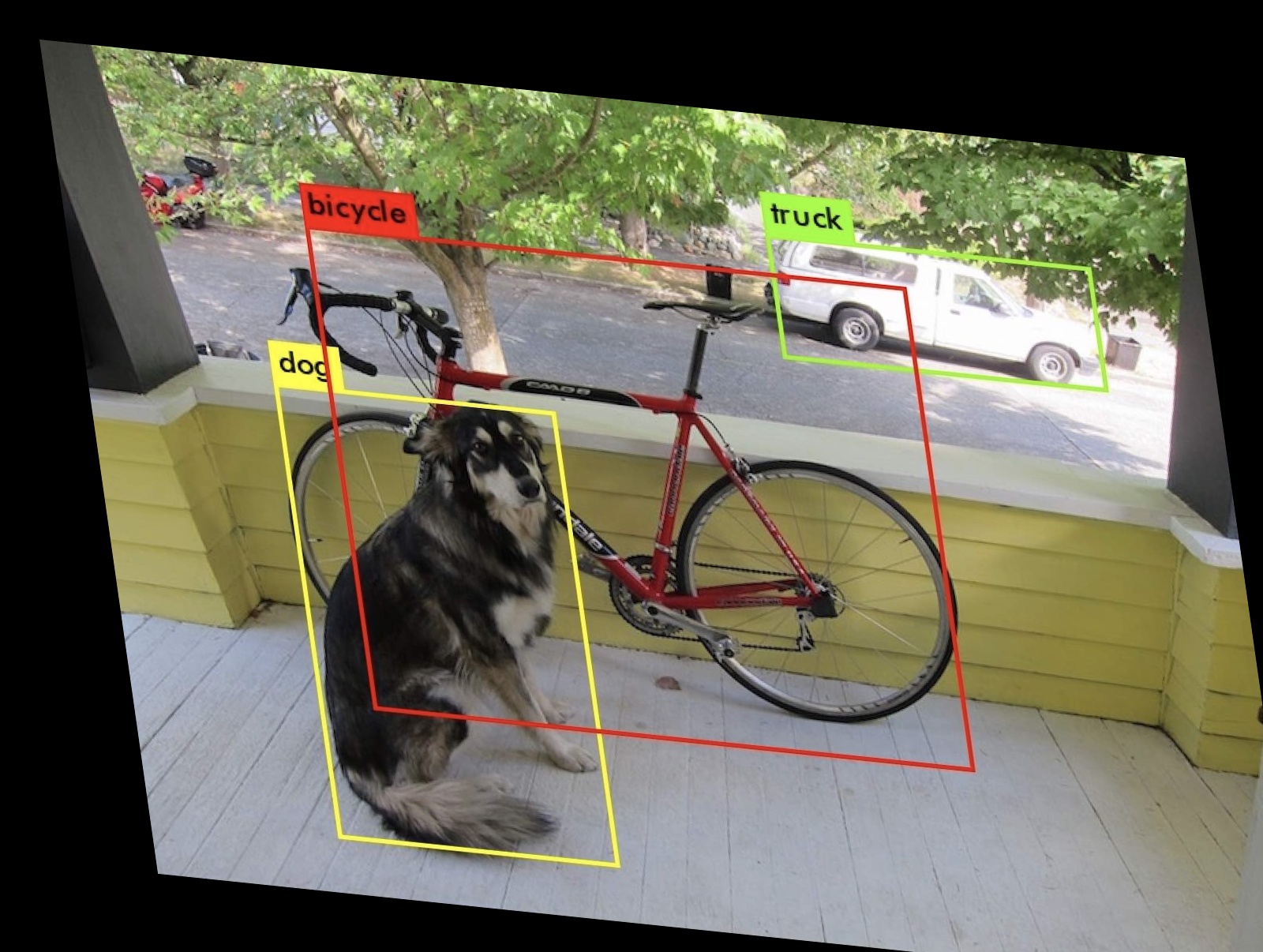
方程中有 6 个未知的参数,如果我们需要求解它们,则至少需要 6 个方程。由于每个像素点都包含了 2 个方程,因此只需要 3 个像素点。好在 OpenCV 提供了函数 cv2.getAffineTransform来根据变换前后 3 个点的对应关系来自动求解 M,例如对于图片
import cv2 |
我们选取图片的三个顶点进行仿射变换,它们分别是左上角:[0, 0],左下角:[0, h-1],右上角:[w-1, 0]。
src_points = np.float32([[0, 0], [0, h-1], [w-1, 0]]) |
变量matAffine就是仿射变换矩阵 M,如果将它打印出来:
array([[9.38086304e-01, 4.14937759e-02, 5.00000000e+01], |
3. 仿射变换
现在可以将刚才求出的仿射变换应用至源图像,使用的是 cv2.warpAffine 函数
affine_result = cv2.warpAffine(image, matAffine, (w,h)) |