import cv2
import pangolin
import numpy as np
import OpenGL.GL as gl
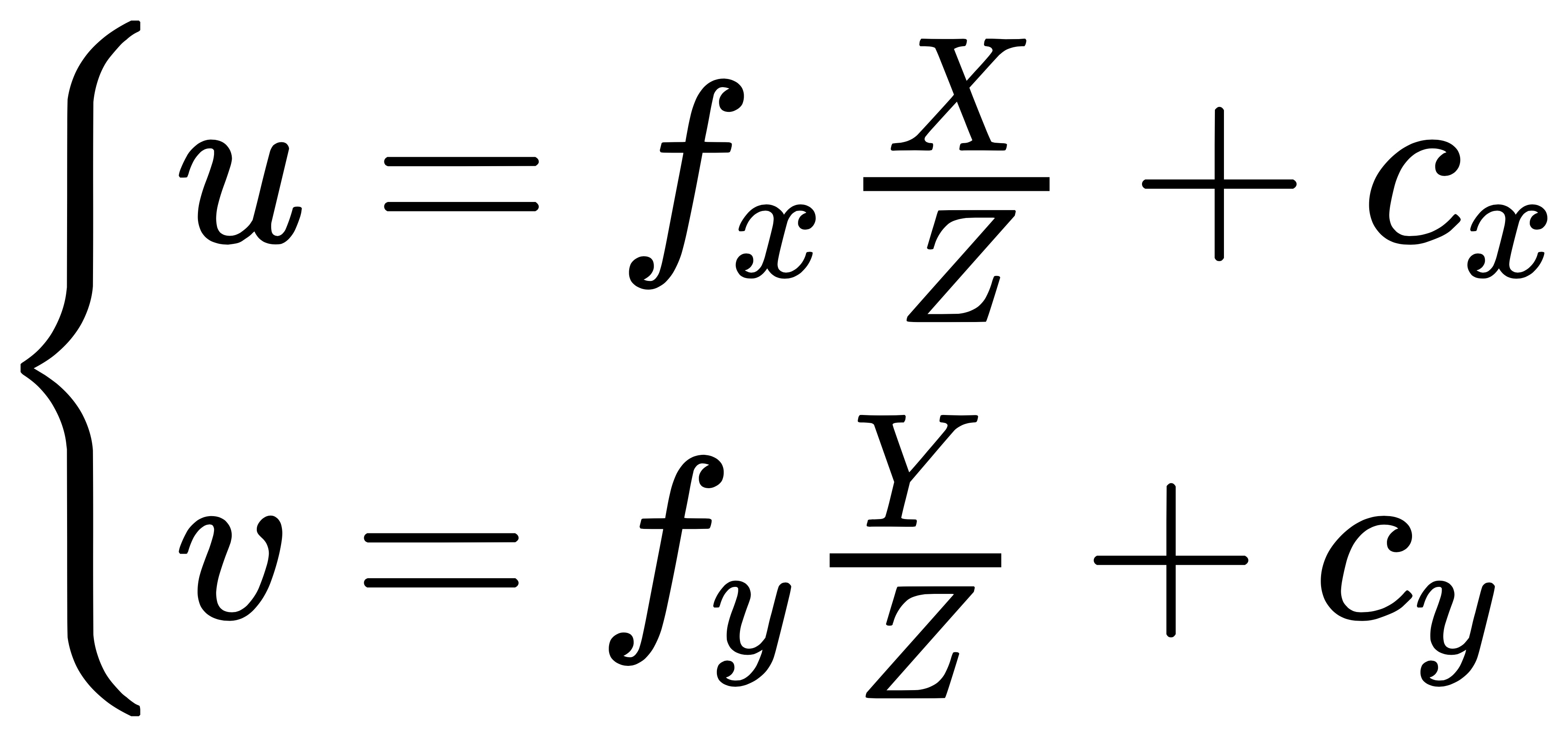
fx = 721.5377
fy = 721.5377
cx = 607.1928
cy = 185.2157
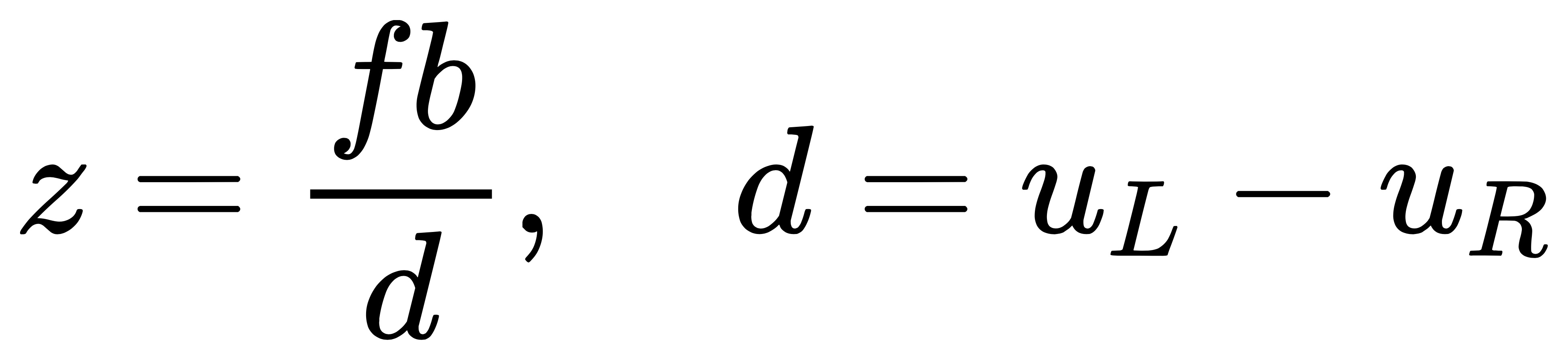
B = 0.54
img_disp = cv2.imread('000004_10_disp.png', -1) / 256.
imgL = cv2.imread('000004_10.jpg')
imgL = cv2.cvtColor(imgL, cv2.COLOR_BGR2RGB)
h, w = imgL.shape[:2]
f = 0.5 * w
points, colors = [], []
for v in range(h):
for u in range(w):
disp = img_disp[v, u]
if disp > 0.:
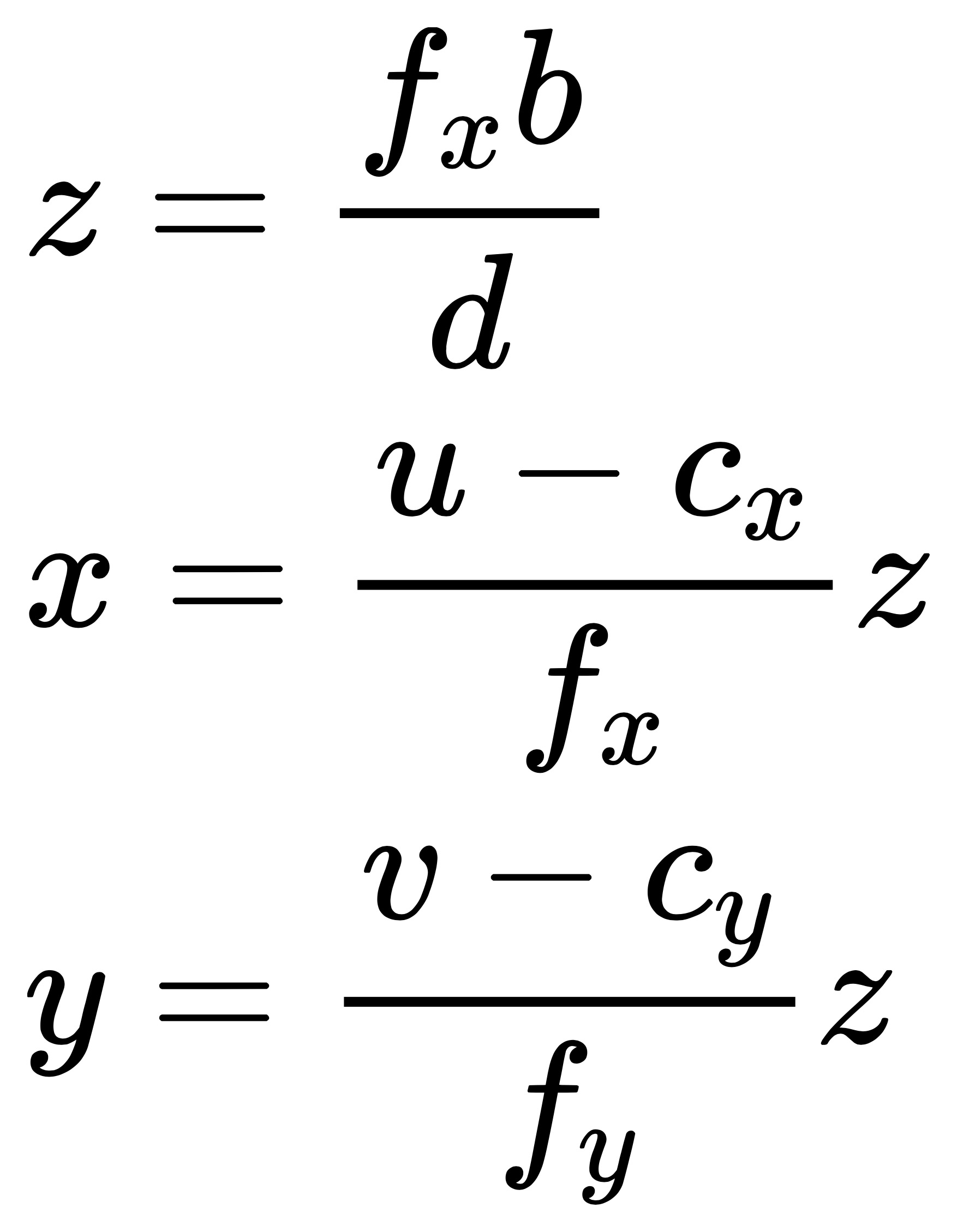
depth = B * fx / disp
z_w = depth
x_w = (u - cx) * z_w / fx
y_w = (v - cy) * z_w / fy
points.append([x_w, y_w, z_w])
colors.append(imgL[v, u])
points = np.array(points)
colors = np.array(colors) / 255.
pangolin.CreateWindowAndBind('Main', 640, 480)
gl.glEnable(gl.GL_DEPTH_TEST)
scam = pangolin.OpenGlRenderState(
pangolin.ProjectionMatrix(640, 480, 2000, 2000, 320, 240, 0.1, 1000),
pangolin.ModelViewLookAt(0, 0, -20, 0, 0, 0, 0, -1, 0))
handler = pangolin.Handler3D(scam)
dcam = pangolin.CreateDisplay()
dcam.SetBounds(0.0, 1.0, 0.0, 1.0, -640.0/480.0)
dcam.SetHandler(handler)
while not pangolin.ShouldQuit():
gl.glClear(gl.GL_COLOR_BUFFER_BIT | gl.GL_DEPTH_BUFFER_BIT)
gl.glClearColor(1.0, 1.0, 1.0, 1.0)
dcam.Activate(scam)
gl.glPointSize(3)
pangolin.DrawPoints(points, colors)
pangolin.FinishFrame()
|